「世界最初のロボットは何か?」と聞かれると、古代のからくりやSF作品を思い浮かべる人も多い。
ところが、ロボットを機械として厳密に定義すると、答えは少し変わってくる。
実はこのテーマ、定義次第で“最古”が入れ替わる、なかなか奥深い雑学なのである。
ロボットを機械的に定義すると何が必要か
ロボット工学では、単に「自動で動く機械」だけではロボットとは呼ばないのが一般的だ。
多くの教科書や研究では、次の3要素を備えることが重視されている。
- 外界を感知するセンサー
- 状況に応じて動作を決める制御・判断機構
- 実際に動くための駆動部(モーターなど)
これを噛み砕くと、「感じて、考えて、動く」機械であることが重要とされている。
この基準に照らすと、歴史上の有名な自動人形の多くは、実はロボットの一歩手前に位置づけられる。
古代の自動機械はロボットなのか
ヘロンの自動機械(紀元前1世紀)
1.jpg)
2.png)
紀元前から1世紀ごろにかけて、古代ギリシャでは水や蒸気を使った自動装置(オートマタ)が作られていた。
神殿の扉が自動で開閉する仕掛けや、人形が動く装置などが記録に残っている。
ただしこれらは、あらかじめ決められた動作を再生するだけの機械だった。外界を感知して行動を変える仕組みは基本的にない。
このため工学的な定義では、高度な自動機械ではあるがロボットとは言い切れないと考えられている。
江戸のからくり人形は“準ロボット”

日本の江戸時代に発達したからくり人形も、よく「初期ロボット」と紹介される。
ゼンマイと歯車、カム機構を組み合わせ、お茶を運んで戻るといった複雑な動作を実現していた。
中には、茶碗を取ると停止するなど、簡単な反応機構を備えたものもある。ここが少しややこしいところだ。
よくある誤解
からくり人形は「考えて動くロボット」と思われがちだが、実際には機械的な条件分岐に近い。
電子的な情報処理や環境認識は行っていない。
そのため多くの研究では、
ロボットに近い存在ではあるが、現代的ロボットの条件は満たさない
という評価に落ち着いている。
機械的定義で有力視される最古のロボット
工学的な基準を厳密に当てはめた場合、有力な候補として挙げられるのが、
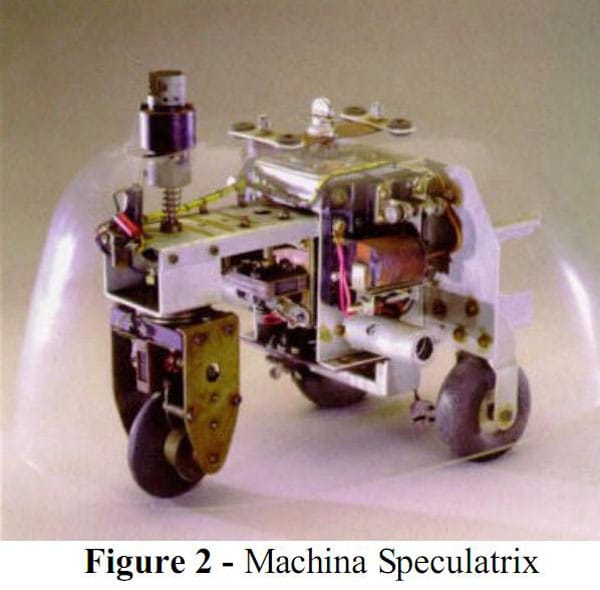
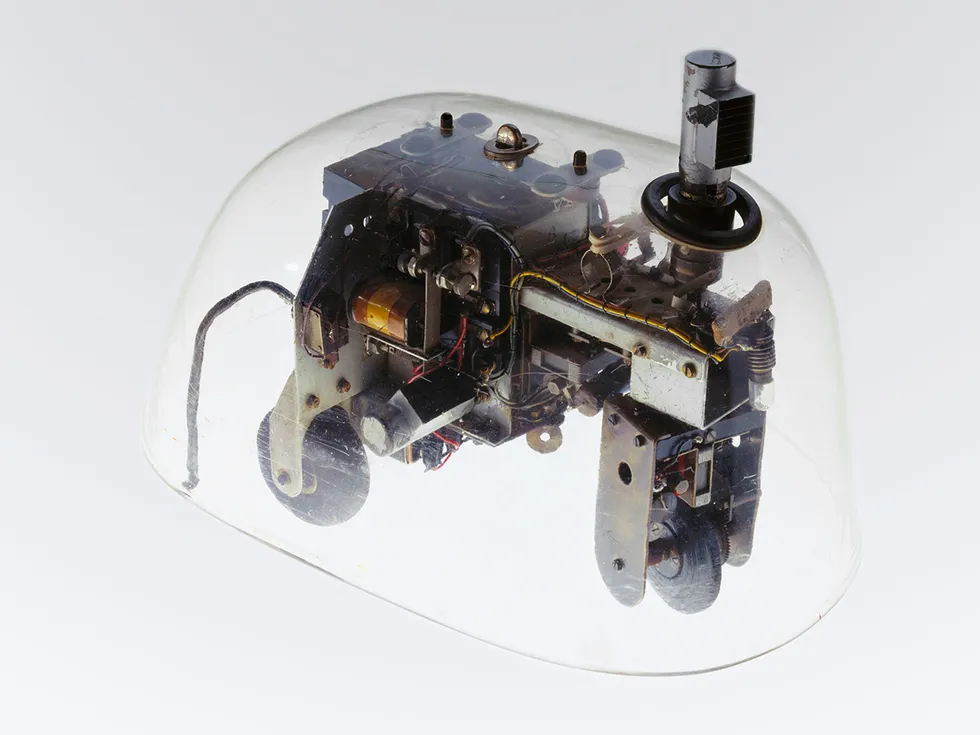
1948〜49年に神経生理学者のウィリアム・グレイ・ウォルターが作った「ロボット亀(Elsie/Elmer)」である。
この小型ロボットは、光センサーで周囲の明るさを感知し、電子回路で進行方向を判断し、モーターで移動した。つまり、
- 感知
- 判断
- 動作
という閉ループを備えていた。これは現代ロボットの基本構造そのものと考えられている。
なぜ「世界最古のロボット」は意見が割れるのか
ここまで見てきた通り、“最古のロボット”論争がややこしい理由は単純だ。
ロボットという言葉自体の意味が、時代とともに広がってきたからである。
もし「自動で動けばロボット」と広く捉えるなら、古代ギリシャの装置が最古になる。
プログラム的動作まで含めるなら、18世紀の精巧なオートマタが候補に入る。
そして「感知・判断・動作」を満たす現代的定義を採用するなら、1948年のロボット亀が最古級と見るのが比較的筋が通る。
こうした事情から、資料や立場によって答えが変わると考えられている。
ロボットの歴史は一直線ではなく、「どこからをロボットと呼ぶか」という視点の違いそのものが、技術の進化を物語っているのかもしれない。
ではでは(^ω^)ノシ
この記事もおすすめ
{kind=link}